隨著建筑行業的快速發展,建材公司作為產業鏈的重要一環,面臨著激烈的市場競爭。如何成功注冊一家建材公司,并在此基礎上構建品牌、優化采購流程、管理產品圖片及拓展批發業務,是企業可持續發展的關鍵。本文將系統探討這些核心環節。
建材公司注冊是創業的第一步。在中國,注冊流程通常包括選擇公司類型(如有限責任公司)、確定注冊資本、選擇經營范圍(涵蓋建筑材料銷售、批發等)、辦理工商登記、稅務登記等。建議在注冊前進行市場調研,明確主營業務方向,例如專注于環保建材或新型復合材料,以差異化定位切入市場。同時,注冊后需申請相關資質認證,如產品質量檢測報告,這有助于提升客戶信任度。
品牌建設是建材公司長期發展的基石。一個強大的品牌能增強市場辨識度,吸引更多客戶。企業應注重品牌命名(易于記憶且與建材相關)、設計專業LOGO和宣傳語,并通過線上渠道(如官網、社交媒體)和線下活動(如行業展會)推廣品牌故事和核心價值。例如,強調產品的耐用性、環保特性或創新技術,以區別于競爭對手。品牌建設不僅涉及產品本身,還包括售后服務,如提供安裝指導或維修支持,這能提升客戶忠誠度。
在采購環節,建材公司需建立高效的供應鏈體系。這包括選擇可靠的供應商(可通過行業平臺或展會篩選),確保原材料質量穩定、價格合理。采購策略應基于市場需求預測,避免庫存積壓或短缺。例如,對于熱門產品如節能門窗或防水材料,可與供應商簽訂長期合同以保障供應。數字化采購工具(如ERP系統)能優化庫存管理和訂單處理,提高運營效率。
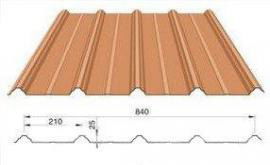
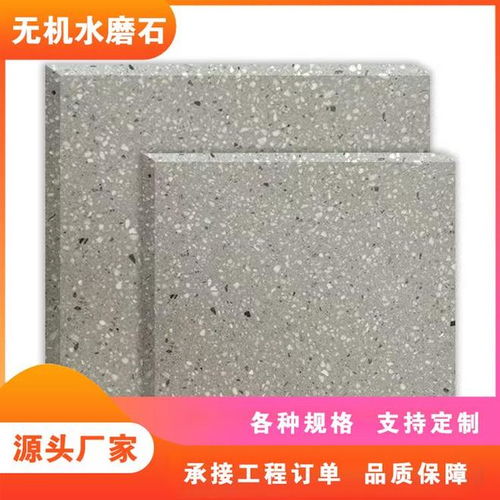
產品圖片管理在建材銷售中至關重要,尤其是在電商時代。高質量的圖片能直觀展示產品細節、顏色和適用場景,吸引潛在買家。建議聘請專業攝影師拍攝產品圖,包括整體效果、局部特寫和實際應用案例。同時,使用圖片管理軟件(如云存儲)分類存儲圖片,便于在官網、B2B平臺或社交媒體上快速調用。注意保持圖片風格一致,以強化品牌形象,并定期更新以反映新產品或季節促銷。
批發業務是建材公司擴大市場份額的重要途徑。針對批發客戶(如建筑承包商或零售商),企業應制定靈活的價格策略,如批量折扣或季節性優惠,以增強競爭力。建立分銷網絡,通過區域代理商或線上B2B平臺(如阿里巴巴)拓展渠道。同時,提供配套服務,如物流配送和技術支持,能提升客戶滿意度。數據分析工具可幫助監控銷售趨勢,優化庫存和營銷策略。
建材公司從注冊到運營,需整合品牌、采購、圖片和批發等要素。通過系統規劃與執行,企業能在競爭激烈的市場中脫穎而出,實現穩健增長。創業者應持續關注行業動態,例如綠色建筑趨勢,以抓住新機遇。